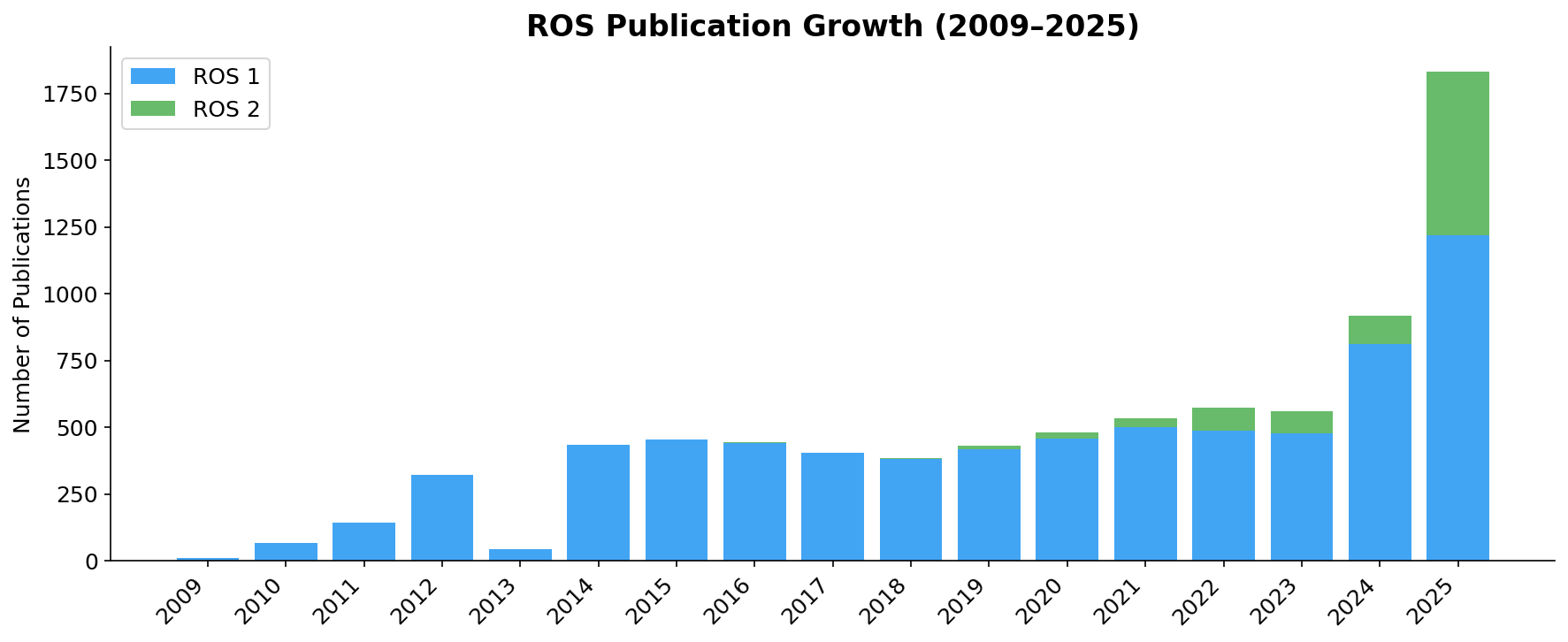
The Robot Operating System (ROS) has been the de facto standard framework for
developing robotics applications since 2009. Its successor, ROS 2, addresses critical
limitations in reliability, real-time performance, security, and multi-robot scalability
through a fundamentally redesigned architecture built on the Data Distribution Service (DDS)
middleware.
This survey provides a comprehensive, multidimensional review of ROS 2 research,
guided by three research questions:
RQ1: How does ROS 2 improve upon ROS 1 in architecture, design goals, and features, and
what new limitations arise?
RQ2: What advances in ROS 2's technical foundations emerge from the literature, and how
are they deployed?
RQ3: What frameworks, libraries, and tools have emerged in the ROS 2 ecosystem, and which
areas remain underdeveloped?
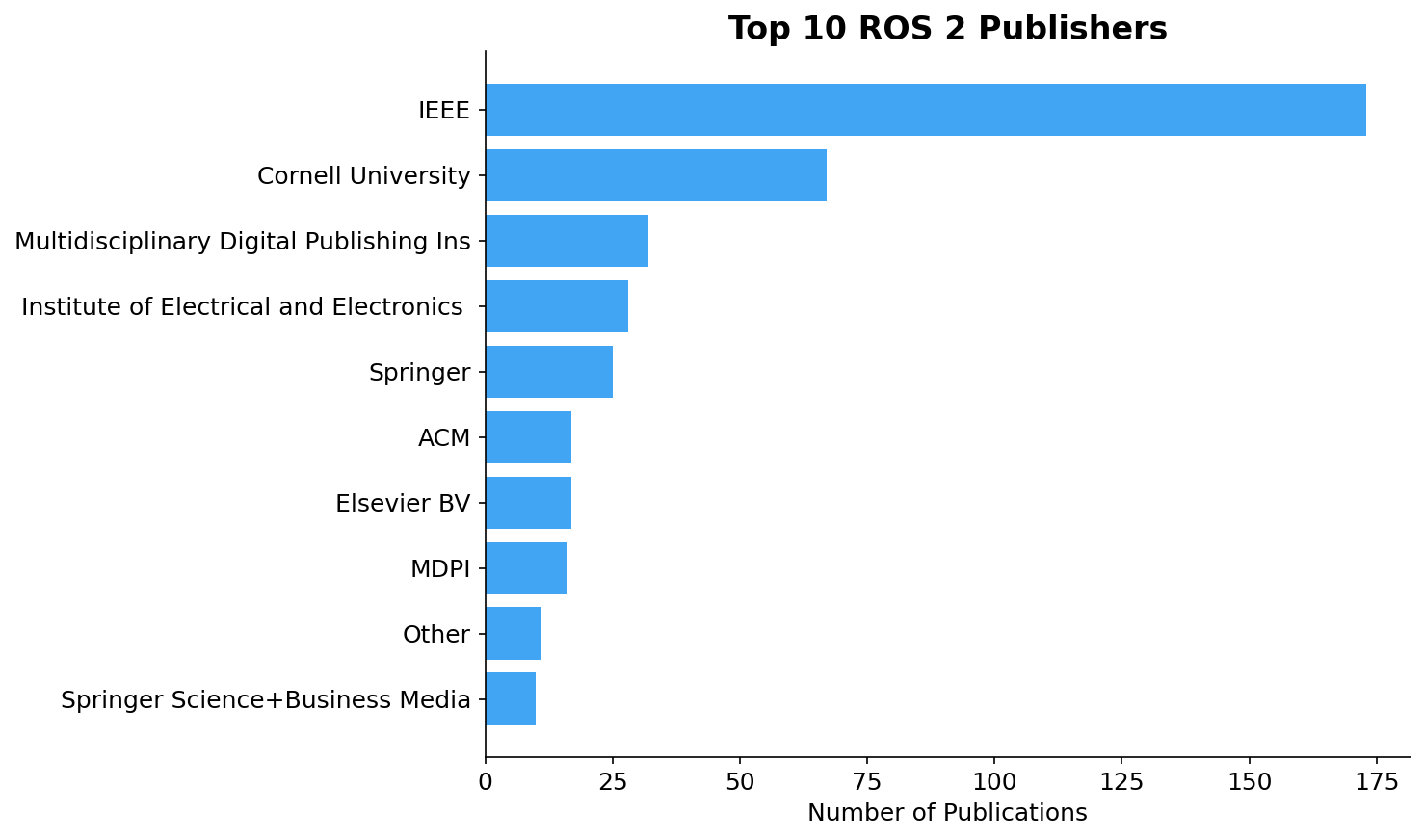
We analyze over 8,500 publications spanning 2009–2026, organizing advances into
four pillars: (1) middleware architectures, (2) real-time scheduling and hardware
acceleration, (3) security, privacy, and safety, and (4) multi-robot and distributed
coordination. The survey is accompanied by a curated, publicly accessible database of
ROS-related resources.